變電站遠(yuǎn)程機(jī)房巡視系統(tǒng)的研發(fā)
0 引言
變電站巡視作為基層通信運(yùn)維班組日常工作中重要的一環(huán),對于確保電力生產(chǎn)安全穩(wěn)定運(yùn)行有著非常重要的意義[1]。在實(shí)際工作中,通信運(yùn)檢班發(fā)現(xiàn)變電站巡視工作時(shí)占用工作時(shí)間太多,導(dǎo)致工作人員外出巡視時(shí)班組本部人手出現(xiàn)短缺,并且人工巡檢工作效率十分低下。針對這個(gè)問題,傳統(tǒng)的解決辦法是在各變電站附近設(shè)立工作站,常駐工作人員巡視,或者在各變電站周圍招募外包團(tuán)隊(duì)代為巡視。但是這2種方案實(shí)際效果不佳,且實(shí)施難以實(shí)現(xiàn)[2-3]。因此本課題提出一種全新的、能夠確定“遠(yuǎn)程信息本地化、管理信息實(shí)時(shí)化”的新型巡視模式,即通過遠(yuǎn)程監(jiān)控的技術(shù)手段,在基層變電站和控制中心實(shí)現(xiàn)信息實(shí)時(shí)互通、統(tǒng)一管理[4-6]。
1 系統(tǒng)需求目標(biāo)和可行性分析
本系統(tǒng)的目標(biāo)是可以對變電站機(jī)房內(nèi)的情況進(jìn)行遠(yuǎn)程巡視,改善實(shí)際工作中遇到的變電站巡視效率低的問題。課題的總體目標(biāo)為采用變電站遠(yuǎn)程巡視系統(tǒng)在工作時(shí)間內(nèi)完全讀取變電站機(jī)房內(nèi)全部數(shù)據(jù)[7]。由于巡視工作對于數(shù)據(jù)準(zhǔn)確性的要求非常高,需要正確地獲取全部數(shù)據(jù),結(jié)合高效運(yùn)維的工作需求,系統(tǒng)設(shè)定目標(biāo)為:30 min內(nèi)獲取的機(jī)房內(nèi)數(shù)據(jù)量達(dá)到280個(gè)以上。
根據(jù)2017年1月到4月的工作記錄統(tǒng)計(jì)分析以及最新查詢結(jié)果顯示:
1)目前的民用攝像頭已經(jīng)具備了采集數(shù)據(jù)的能力,并可以通過變電站機(jī)房與本公司之間已有的告警信息通路傳輸[8];
2)公司大力支持創(chuàng)新,小組成員熟悉通信技術(shù)、編程和調(diào)試,并有參與QC小組活動的經(jīng)驗(yàn),有較強(qiáng)的方案設(shè)計(jì)和動手制作能力,并有相關(guān)人員為活動提供技術(shù)指導(dǎo);
3)有與電力行業(yè)相關(guān)的遠(yuǎn)程視頻監(jiān)控系統(tǒng)可供借鑒;課題所應(yīng)用的設(shè)備都屬于小型可控范圍,在小組的技術(shù)水平范圍之內(nèi)[9];
4)據(jù)班組工作記錄,3月7日工作人員曾在白石巖變電站僅用30 min便采集了所有數(shù)據(jù)。
由此可見,該系統(tǒng)需求目標(biāo)完全是可以實(shí)現(xiàn)的。
2 系統(tǒng)總體方案和功能模塊
2.1 系統(tǒng)總體方案
目前,遠(yuǎn)程巡視系統(tǒng)主要有2種實(shí)現(xiàn)方式:第一種是以高清攝像頭采集預(yù)設(shè)點(diǎn)位的信息,將它們通過本公司設(shè)置的服務(wù)器內(nèi)置程序呈現(xiàn)在提前建好的模型上;第二種是采用全景攝像頭攝錄整個(gè)機(jī)房的情況,將得到的全部數(shù)據(jù)傳輸回本公司,以真實(shí)圖像呈現(xiàn)的全景方式[10]。
2017年6月12日,工作人員在白石巖變電站機(jī)房內(nèi)以光纖配線架為實(shí)驗(yàn)對象,取其上的72個(gè)數(shù)據(jù)為目標(biāo)樣本分別進(jìn)行對2種方案進(jìn)行實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果見
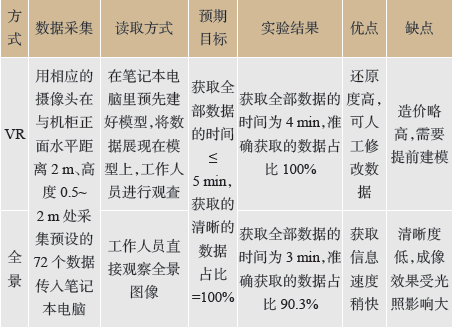 表1 遠(yuǎn)程巡視系統(tǒng)實(shí)現(xiàn)方式比較Tab.1 Comparison of remote inspection system implementation
表1 遠(yuǎn)程巡視系統(tǒng)實(shí)現(xiàn)方式比較Tab.1 Comparison of remote inspection system implementation
由
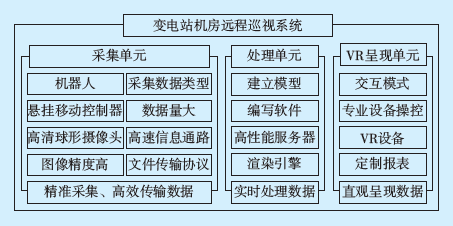 圖1 巡視系統(tǒng)方案架構(gòu)Fig.1 Inspection system scheme architecture
圖1 巡視系統(tǒng)方案架構(gòu)Fig.1 Inspection system scheme architecture
2.2 功能模塊
2.2.1 采集單元模塊
采集單元模塊由機(jī)器人、懸掛移動控制器、高清球形攝像頭等構(gòu)成,數(shù)據(jù)采集方式主要有所有實(shí)景信息采集和預(yù)設(shè)點(diǎn)位只抓取示數(shù)和信號燈2種,實(shí)景信息采集優(yōu)點(diǎn)是數(shù)據(jù)量大,峰值為200 Mb/s,靈活性高,并且后期幾乎不需要處理即可展現(xiàn);缺點(diǎn)是細(xì)微部分較差,對于細(xì)微問題難以發(fā)現(xiàn),預(yù)設(shè)點(diǎn)位的方式則和實(shí)景信息采集的特點(diǎn)剛好相反[12]。為了更好的及時(shí)發(fā)現(xiàn)和處理問題并且減少后期數(shù)據(jù)處理,本系統(tǒng)采取預(yù)設(shè)點(diǎn)位和實(shí)景信息采集并用的方式,即:一般情況下采集預(yù)設(shè)點(diǎn)位的信息,同時(shí)保留實(shí)景模式作為輔助,有需要時(shí)可以查看現(xiàn)場的真實(shí)情況。并且提出了用二維碼輔助方案二的設(shè)想,通過掃描設(shè)備上的二維碼,系統(tǒng)可自動識別設(shè)備的信息,解決了該方案無法變通的缺點(diǎn)。
采集單元決定了采集數(shù)據(jù)的清晰度,影響采集數(shù)據(jù)清晰度的因素有:搭載攝像頭方式、攝像頭、機(jī)柜柜門。通過綜合對比并結(jié)合實(shí)際情況,本系統(tǒng)采用益可達(dá)YKD-NSZ-10軌道式機(jī)器人搭載DS-2DC7520IW-A 500萬球形攝像頭配合玻璃柜門方案,測試結(jié)果達(dá)到預(yù)期效果,由此確定采集數(shù)據(jù)部分為此方案。同時(shí),考慮到光纖配線架 (Optical Distribution Frame,ODF)機(jī)柜上有部分采點(diǎn)對象距離地面高度僅30 cm,不易于從天花板上設(shè)立的軌道上的機(jī)器人采集,故在ODF機(jī)柜設(shè)立自動開門裝置,在機(jī)器人巡視到時(shí)自動開門。
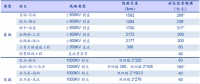
由于傳輸最高瞬時(shí)帶寬為200 Mb/s,目前,從白石巖變電站到廣元公司已有帶寬為1 Gb/s的數(shù)據(jù)傳輸通道,滿足本系統(tǒng)的帶寬需求。因此決定沿用已有通信線路,對于傳輸協(xié)議的選擇,TCP協(xié)議雖然在丟包率、延遲、實(shí)際傳輸速率的實(shí)測結(jié)果中的性能比UDP協(xié)議高,但速率可能無法達(dá)到系統(tǒng)要求,并且測試結(jié)果表明UDP協(xié)議傳輸對于數(shù)據(jù)丟包率、延時(shí)等對于實(shí)際接收展示質(zhì)量可忽略不計(jì),因此系統(tǒng)選用UDP協(xié)議進(jìn)行數(shù)據(jù)傳輸[13-14]。
服務(wù)器選擇方面,本系統(tǒng)需要處理渲染的數(shù)據(jù)量較大,需要性能較好的服務(wù)器。本公司服務(wù)器保有量較大,為物盡其用,節(jié)約成本,本系統(tǒng)決定選用本公司閑置的E3-1230 V3服務(wù)器。
2.2.2 處理單元模塊
處理單元模塊主要由建立模型、編寫軟件、渲染引擎等組成。機(jī)房3D數(shù)據(jù)化需要對機(jī)房場景及設(shè)備進(jìn)行三維模型制作配合VR模式數(shù)據(jù)呈現(xiàn),模型制作的方式直接影響制作的效率和最終呈現(xiàn)的效果。根據(jù)實(shí)際情況,初步確定在3DS MAX、MAYA 2種建模方案中選擇,二者特點(diǎn)如下。
1) 3DS MAX是目前世界上應(yīng)用最為廣泛的效果圖及動畫制作軟件之一 ,被廣泛應(yīng)用于影視制作、廣告設(shè)計(jì)、建筑裝潢設(shè)計(jì)、三維游戲制作等方面。3DS MAX制作團(tuán)隊(duì)數(shù)量較多。角色和游戲方面的制作不如MAYA。
2)MAYA講求細(xì)節(jié),動畫作品制作精致細(xì)膩,許多影視大片都用MAYA團(tuán)隊(duì)完成。MAYA的 POLYGONS(多邊形)建模明顯不如3DS MAX使用方便。
從精細(xì)度、易建模和經(jīng)濟(jì)性綜合對比,最終采用3DS MAX建模方案。
機(jī)房3D數(shù)據(jù)化需要對機(jī)房場景及設(shè)備進(jìn)行一些便捷操作,以便觀察記錄。系統(tǒng)選擇目前主流的Unreal Engine 4引擎,并采用C語言進(jìn)行平臺開發(fā)[15]。
2.2.3 VR呈現(xiàn)單元模塊
作為呈現(xiàn)數(shù)據(jù)的呈現(xiàn)單元,VR設(shè)備是非常重要的一環(huán)。目前市面上的VR設(shè)備良莠不齊,主流設(shè)備分別是Facebook公司旗下的Oculus Rift、HTC公司旗下的Vive、索尼公司旗下的PlayStation VR。PSVR兼容性太差,首先剔除。遠(yuǎn)程巡視需要較大活動空間,在其他方面大致相同的前提下,從系統(tǒng)兼容性、分辨率以及系統(tǒng)追蹤3個(gè)方面做對比,最終選用HTC Vive作為呈現(xiàn)單元。
根據(jù)以往的機(jī)房設(shè)備巡視記錄表,需要巡視的內(nèi)容都是標(biāo)準(zhǔn)數(shù)字的示數(shù)、紅黃綠燈等可簡單圖像識別的數(shù)據(jù),使用簡單的圖像處理系統(tǒng)識別之后,系統(tǒng)可以自行制作電子數(shù)據(jù)報(bào)表并存檔。根據(jù)確定的最佳方案,制訂了詳細(xì)的方案實(shí)施對策表(見
 表2 最佳方案實(shí)施對策表Tab.2 The best implementation countermeasure table
表2 最佳方案實(shí)施對策表Tab.2 The best implementation countermeasure table
3 系統(tǒng)建模和測試
本系統(tǒng)通過實(shí)地測量機(jī)房內(nèi)建筑和各機(jī)柜的尺寸、構(gòu)架,用3DS MAX建立了與實(shí)景1:1的等比例模型。
3.1 根據(jù)對策表實(shí)施對策
依據(jù)方案和對策表定制了需要的懸架和軌道,于2017年6月10日將懸梁和采集單元安裝完成。在安裝完成后將機(jī)器人速度設(shè)置為沿軌道用時(shí)20 s完成一次往返,進(jìn)行8次穩(wěn)定性測試,結(jié)果見
 表3 機(jī)器人運(yùn)行穩(wěn)定性測試Tab.3 The test list of robot operation stability
表3 機(jī)器人運(yùn)行穩(wěn)定性測試Tab.3 The test list of robot operation stability
實(shí)驗(yàn)結(jié)果非常令人滿意,系統(tǒng)安裝的軌道機(jī)器人達(dá)到了預(yù)期目標(biāo)。
3.2 開發(fā)呈現(xiàn)系統(tǒng)
系統(tǒng)基于Unreal Engine 4引擎,使用C語言開發(fā)符合需求的系統(tǒng)。開發(fā)完成后,將建好的模型導(dǎo)入并測試了延遲。
經(jīng)過試驗(yàn),本系統(tǒng)的延遲時(shí)間<20 ms,達(dá)到預(yù)設(shè)要求,且非常穩(wěn)定,表明系統(tǒng)開發(fā)成功。
3.3 HTC Vive呈現(xiàn)
本系統(tǒng)根據(jù)HTC Vive套件說明書進(jìn)行了安裝調(diào)試,成功后導(dǎo)入模型和程序進(jìn)行試驗(yàn)。為保證系統(tǒng)的可靠性,對設(shè)備延遲時(shí)間進(jìn)行了測試,試驗(yàn)結(jié)果表明,在連續(xù)不斷運(yùn)轉(zhuǎn)10 h之后,系統(tǒng)的延遲小于預(yù)設(shè)目標(biāo)100 ms,且?guī)缀鯖]有變化,達(dá)到了系統(tǒng)的預(yù)期要求。
3.4 制作數(shù)據(jù)報(bào)表
根據(jù)使用的機(jī)房設(shè)備巡視記錄表,系統(tǒng)制定了將生成的報(bào)表項(xiàng)目。由于所要采集的數(shù)據(jù)都是標(biāo)準(zhǔn)數(shù)字、紅黃綠燈等,運(yùn)用簡單的圖像識別技術(shù)即可自動識別。系統(tǒng)預(yù)設(shè)置了機(jī)房內(nèi)設(shè)備的關(guān)系圖。基于此關(guān)系圖,制作完成了機(jī)房設(shè)備巡視表格式(見
共設(shè)置了5次試驗(yàn),檢測報(bào)表生成速度和數(shù)據(jù)準(zhǔn)確性,試驗(yàn)結(jié)果見
經(jīng)過試驗(yàn),數(shù)據(jù)報(bào)表生成時(shí)間小于預(yù)設(shè)目標(biāo)10 min,且準(zhǔn)確度達(dá)到100%,試驗(yàn)成功。
3.5 系統(tǒng)聯(lián)調(diào)
9月2日,對整套系統(tǒng)進(jìn)行了聯(lián)合調(diào)試。實(shí)測結(jié)果見
由于實(shí)施對策時(shí)每一步都嚴(yán)謹(jǐn)?shù)剡M(jìn)行了成效檢查和分析,所以系統(tǒng)聯(lián)調(diào)取得成功。
3.6 目標(biāo)檢查
系統(tǒng)根據(jù)對策表實(shí)施完成了所有的準(zhǔn)備工作,在2017年9月10日進(jìn)行目標(biāo)檢查,檢查效果見
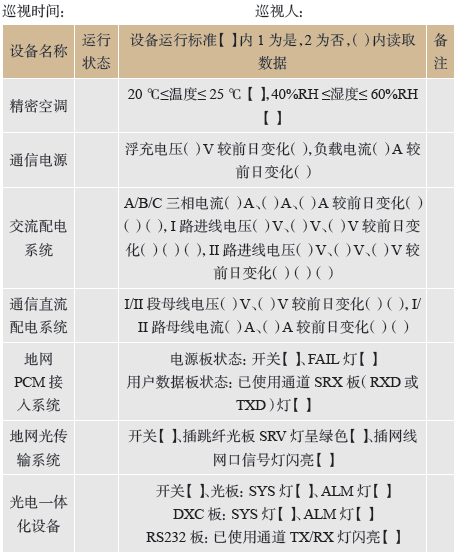 表4 機(jī)房設(shè)備巡視記錄Tab.4 The inspection record of information computer room
表4 機(jī)房設(shè)備巡視記錄Tab.4 The inspection record of information computer room
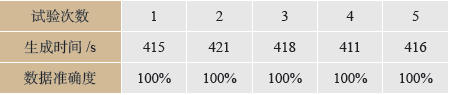 表5 報(bào)表生成速度和準(zhǔn)確性Tab.5 The speed and accuracy of report table generation
表5 報(bào)表生成速度和準(zhǔn)確性Tab.5 The speed and accuracy of report table generation
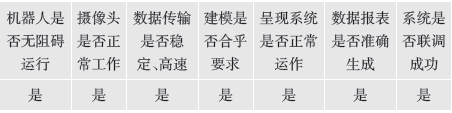 表6 系統(tǒng)聯(lián)調(diào)效果測試表Tab.6 The test list of system inter modulation effect
表6 系統(tǒng)聯(lián)調(diào)效果測試表Tab.6 The test list of system inter modulation effect
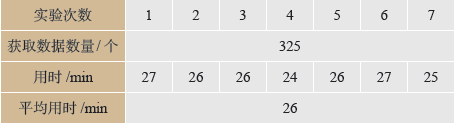 表7 目標(biāo)檢查效果Tab.7 The effect of object check
表7 目標(biāo)檢查效果Tab.7 The effect of object check
與傳統(tǒng)方法巡視白石巖變電站用時(shí)230 min對比,應(yīng)用變電站機(jī)房遠(yuǎn)程巡視系統(tǒng),在30 min內(nèi)就能完整、準(zhǔn)確地獲取所需的325個(gè)數(shù)據(jù),并且能生成巡檢報(bào)表,方便查閱,系統(tǒng)制定的方案目標(biāo)完全達(dá)到要求。
4 結(jié)語
至2017年10月15日為止的5周時(shí)間內(nèi),該系統(tǒng)在白石巖變電站例行巡查了5次,每一次都進(jìn)行了人工巡視和利用本系統(tǒng)巡視的效果對比。本系統(tǒng)獲取數(shù)據(jù)的準(zhǔn)確率都達(dá)到了100%,顯現(xiàn)出相當(dāng)?shù)目煽啃浴?/span>
變電站機(jī)房遠(yuǎn)程巡視系統(tǒng)徹底改變了傳統(tǒng)巡視模式,將工作人員到站巡查的傳統(tǒng)巡查模式變?yōu)檫h(yuǎn)程在線巡查模式,在30 min內(nèi)就能準(zhǔn)確獲取巡視的機(jī)房內(nèi)所需的所有數(shù)據(jù),大大提高工作效率;減少了發(fā)生故障到查出故障的時(shí)間,減少了變電站脫網(wǎng)風(fēng)險(xiǎn)。
官方微信售電那點(diǎn)事兒")
責(zé)任編輯:售電衡衡
- 相關(guān)閱讀
- 泛在電力物聯(lián)網(wǎng)
- 電動汽車
- 儲能技術(shù)
- 智能電網(wǎng)
- 電力通信
- 電力軟件
- 高壓技術(shù)
-

權(quán)威發(fā)布 | 新能源汽車產(chǎn)業(yè)頂層設(shè)計(jì)落地:鼓勵“光儲充放”,有序推進(jìn)氫燃料供給體系建設(shè)
2020-11-03新能源,汽車,產(chǎn)業(yè),設(shè)計(jì) -

中國自主研制的“人造太陽”重力支撐設(shè)備正式啟運(yùn)
2020-09-14核聚變,ITER,核電 -

探索 | 既耗能又可供能的數(shù)據(jù)中心 打造融合型綜合能源系統(tǒng)
2020-06-16綜合能源服務(wù),新能源消納,能源互聯(lián)網(wǎng)
-

新基建助推 數(shù)據(jù)中心建設(shè)將迎爆發(fā)期
2020-06-16數(shù)據(jù)中心,能源互聯(lián)網(wǎng),電力新基建 -

泛在電力物聯(lián)網(wǎng)建設(shè)下看電網(wǎng)企業(yè)數(shù)據(jù)變現(xiàn)之路
2019-11-12泛在電力物聯(lián)網(wǎng) -

泛在電力物聯(lián)網(wǎng)建設(shè)典型實(shí)踐案例
2019-10-15泛在電力物聯(lián)網(wǎng)案例
-

新基建之充電樁“火”了 想進(jìn)這個(gè)行業(yè)要“心里有底”
2020-06-16充電樁,充電基礎(chǔ)設(shè)施,電力新基建 -

燃料電池汽車駛?cè)雽こ0傩占疫€要多久?
-

備戰(zhàn)全面電動化 多部委及央企“定調(diào)”充電樁配套節(jié)奏
-
權(quán)威發(fā)布 | 新能源汽車產(chǎn)業(yè)頂層設(shè)計(jì)落地:鼓勵“光儲充放”,有序推進(jìn)氫燃料供給體系建設(shè)
2020-11-03新能源,汽車,產(chǎn)業(yè),設(shè)計(jì) -
中國自主研制的“人造太陽”重力支撐設(shè)備正式啟運(yùn)
2020-09-14核聚變,ITER,核電 -

能源革命和電改政策紅利將長期助力儲能行業(yè)發(fā)展
-
探索 | 既耗能又可供能的數(shù)據(jù)中心 打造融合型綜合能源系統(tǒng)
2020-06-16綜合能源服務(wù),新能源消納,能源互聯(lián)網(wǎng) -

5G新基建助力智能電網(wǎng)發(fā)展
2020-06-125G,智能電網(wǎng),配電網(wǎng) -

從智能電網(wǎng)到智能城市